Samsung Patents a Wheel-by-Wheel Speed System to Keep Robots on Path
Getting a wheeled robot to follow a curved path without drifting off it is harder than it looks. Samsung's latest patent tackles the problem by calculating exactly how fast each individual wheel should spin — and peeking ahead at upcoming curves before they arrive.
What Samsung's per-wheel path correction actually does
Imagine a robot vacuum that's supposed to follow a specific cleaning route, but every time it hits a curve it either overshoots or hugs the inside too tightly. That's a real problem for any wheeled machine, and the fix isn't just 'go a little slower' — it requires precisely coordinating every wheel.
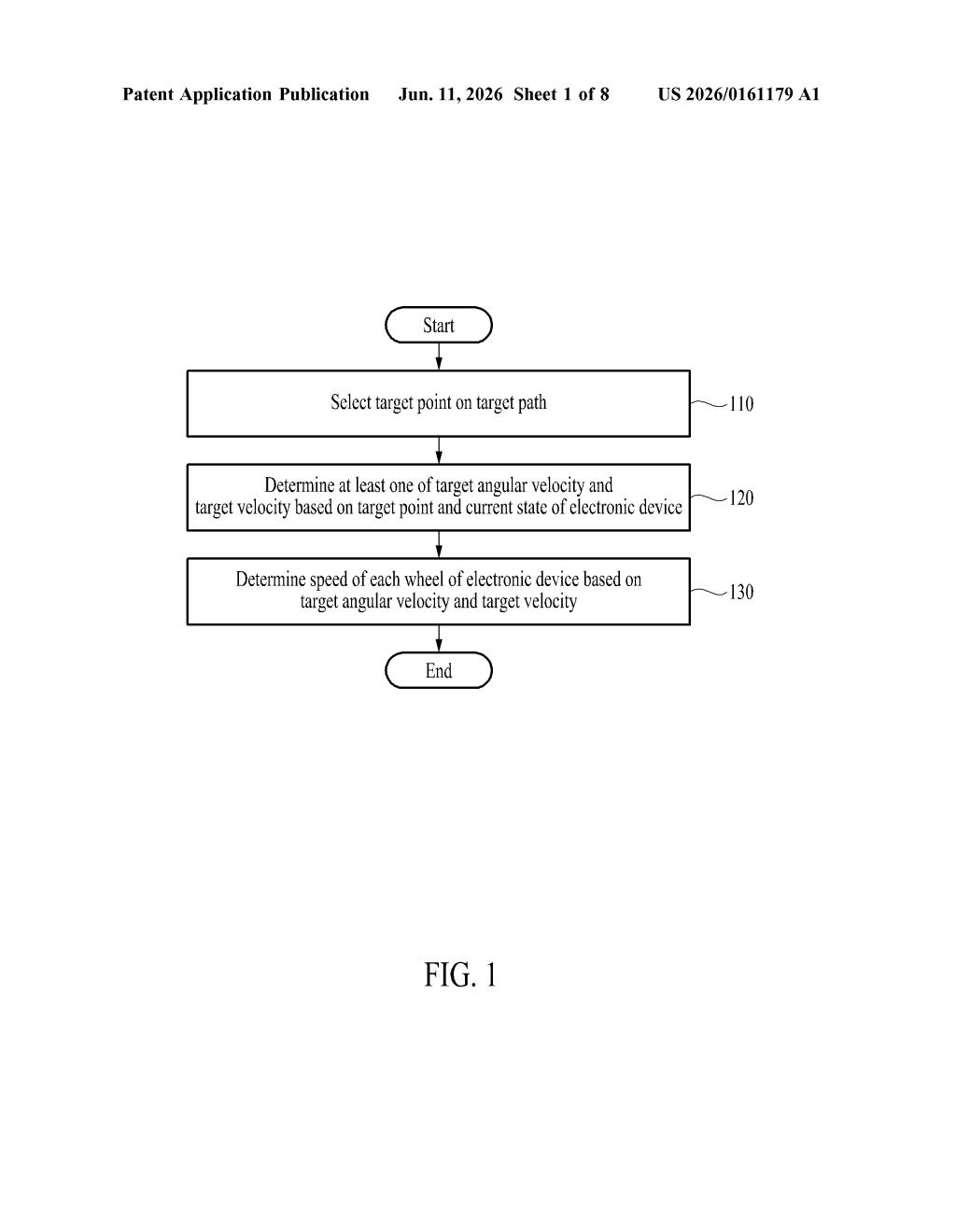
Samsung's patent describes a system where the robot first picks a target point along its intended route, then figures out the right speed to travel at — not just based on where it is right now, but also by previewing the curvature of the path ahead of it. Think of it like a driver who slows down before entering a bend, not after.
From those speed calculations, the system works out exactly how fast each individual wheel should rotate to keep the device accurately tracking the planned route. The result is smoother, more precise movement — especially around corners.
How the device picks velocity based on curve previews
The patent describes a path-tracking algorithm for wheeled electronic devices — robots, autonomous carts, or similar machines. At its core, the system continuously selects a target point on a pre-defined route and computes what speed and turning rate the device needs to hit that point accurately.
The clever part is how it calculates the target velocity (how fast to go straight). It can choose from three inputs:
- First linear velocity — based on the device's current position relative to the path
- Second linear velocity — based on a curvature preview position, meaning a look-ahead point further along the route where the path starts to bend
- Third linear velocity — a fallback or alternative speed figure
The look-ahead approach is significant. Standard path-tracking systems react to curvature only when the robot is already in a turn; this system anticipates the curve and adjusts speed before entering it — reducing overshoot and improving accuracy.
Once the target angular velocity (how fast to rotate) and target linear velocity are set, the system translates those into individual wheel speeds for each wheel, which is how differential-drive robots (think: two independently powered wheels) steer in the first place.
What this means for Samsung's wheeled robot ambitions
Samsung has been expanding into home and industrial robotics, and precise motion control is a fundamental building block for any wheeled robot that needs to follow a planned route — whether that's a cleaning robot navigating furniture or a warehouse bot moving along a set path. A path-tracking system that anticipates curves rather than just reacting to them directly improves how reliably your robot stays on task without constant correction.
The patent is relatively narrow in scope — it covers a specific method for computing wheel speeds from velocity inputs — so it reads more like a component-level engineering contribution than a sweeping product vision. Still, it signals that Samsung is doing foundational motion-planning work in-house rather than relying entirely on off-the-shelf robotics libraries.
This is solid, unglamorous robotics engineering — the kind of low-level motion-control work that has to exist before any wheeled robot can do anything useful. It won't make headlines on its own, but it fits a clear pattern of Samsung building out a robotics IP portfolio piece by piece. Worth tracking as part of that broader story.
Which company should we read for you?
We track 17 companies here. Pro is the same weekly breakdown for any company you choose, delivered privately. Type a name and we'll scope it and send you a quote.
Get one Big Tech patent every Sunday
Plain English, intelligent commentary, no hype. Free.
Editorial commentary on a publicly published patent application. Not legal advice.